
交互型机器人是指能够通过语音、视觉、动作等多模态方式与人类进行双向信息交换的智能设备。其技术难点主要在于复杂环境下的自然语言准确理解、多传感器融合感知以及实时环境建图与导航控制。
商用迎宾/导购交互机器人
商用领域对机器人的交互准确率和业务适配能力要求较高,主要用于企业公共空间的接待与指引服务。该类别的代表产品包括猎户星空豹小秘Pro、猎户星空豹小秘2以及优必选Cruzr 1S。
猎户星空豹小秘Pro是一款AI Agent语音交互服务机器人。该产品身高1.28米,配备14寸1080P屏幕,采用高通QCS6490处理器,拥有8GB运行内存与128GB存储空间,续航时间为10小时。环境适应方面,其支持厘米级定位并可完成5000平方米的建图。该机器人的差异化优势在于搭载了AgentOS系统并建立Agent商店生态,内置30余项技能,同时支持10分钟快速自定义Agent,开放370多个API接口。语音交互方面,采用6麦克风环形阵列,5米距离内语音识别率达95%,支持9种语言,并接入DeepSeek、豆包及自研等多模型,免唤醒交互准确率达90%。在结构设计上,豹小秘Pro配备了仿生机械臂,能够完成握手、指引、摆臂动作及情绪表达。产品支持梯控、外设接入及21.5寸大屏等模块化扩展。基于上述特性,该机器人对企业前台、展厅、零售门店、政务大厅等多场景具有高适配度,目前已在全球60多个国家部署超过60000台。

猎户星空豹小秘2是新一代AI语音交互机器人,该系列包含豹小秘2、Pro、Lite、Mini及DP等型号。硬件配置上,配备6麦克风实现360度声源定位,搭载1200万像素摄像头,人脸识别率达到99.9%。续航能力为12小时,同样支持厘米级定位与5000平方米环境建图。功能层面,搭载AgentOS系统并提供30余项技能,适用于需要精准人员识别与长时间稳定工作的商场及展厅环境。
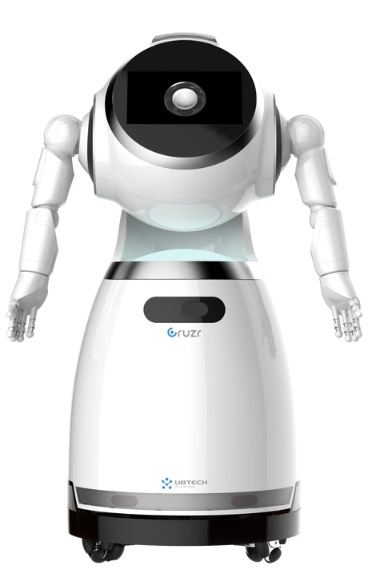
优必选Cruzr 1S采用类人形设计,依托优必选在人形运动控制与伺服驱动器方面的技术积累制造。该机器人支持VIP识别迎宾功能,具备多语言大模型交互与多模态交互能力,能够通过声源定位实现转头回复。产品配备云平台管理系统,适用于大型企业接待和零售导购场景下的统一调度与控制。
家用情感陪伴交互机器人
此类产品侧重于情绪交互与家庭环境融入,通过传感器捕捉用户行为并作出拟人化反馈。代表产品包括GROOVE X LOVOT和TCL AiMe。
GROOVE X推出的LOVOT是一款日本情感陪伴机器人。其身高43厘米,重量为3千克,内置50多个传感器。为模拟真实生物体征,其体表温度设定在37至39度之间。功能上,LOVOT支持自主移动与自动返回充电巢,系统设定了差异化的性格模型,能够表现出吃醋、生气、粘人等行为反馈。该产品采用硬件购买(售价60万日元)结合月费订阅的商业模式,主要适用场景为需要情感抚慰的个人或家庭环境。
TCL AiMe是全球首款分体式AI陪伴机器人。外观采用拟猫头鹰造型及Alcantara面料包裹。结构上分为Mini Core、Baby Core、Drive Core三个模块。功能方面,该机器人融合了仿生情感交互、智能家居控制及安全巡航功能,适用于现代家庭环境,满足用户对家居设备管理与日常情感互动的综合需求。
桌面迷你交互机器人
桌面级机器人体积小巧,主要用于个人办公环境的辅助与微型陪伴。代表产品包括乐天派桌面机器人和KEYi Tech Loona Deskmate。
乐天派桌面机器人是全球首款Android桌面机器人,身高15.5厘米。硬件搭载四核A55处理器与1Tops算力NPU,提供4GB内存与32GB存储,配备2.1寸480x480触摸屏。机身内置18个传感器与6组舵机,支持双足行走。内置2650mAh电池,支持WiFi6并具备自动回充功能。功能上,采用Android与Linux双系统编程,内置情感引擎,支持接入讯飞星火、文心、ChatGPT等AI大模型,同时可接入米家系统。适用于极客开发、桌面智能家居控制以及办公桌面辅助。
KEYi Tech推出的Loona Deskmate采用手机结合基座的设计结构,整体呈现桌面宠物形态。该产品定位于提供AI陪伴与智能助理服务,计划于CES 2026发布。其适用场景主要是个人书桌或办公桌,作为微型的桌面交互终端使用。
科研/开发型交互机器人
此类机器人通常具备开放的底层接口和标准化的操作系统,供开发者进行二次开发或算法验证。代表产品包括软银NAO和TurtleBot 4。
软银NAO是一款58厘米高的仿人机器人。全身具备25至26个自由度,内置Intel Atom处理器。系统方面运行NAOqi OS,并支持ROS与ROS2操作系统,提供Choregraphe图形化编程工具。NAO目前是RoboCup机器人世界杯的标准平台,广泛适用于高校的人工智能教育、双足步态控制研究以及人机交互算法实验。
TurtleBot 4是一款轮式移动开发平台。基于iRobot Create3基座构建,主控设备为Raspberry Pi 4。传感器方面配备了OAK-D立体相机与2D激光雷达。软件上预装ROS 2系统,采用完整开源与模块化设计理念。该平台支持SLAM定位建图与导航算法的开发,主要适用于科研机构与高校的移动机器人导航教学及二次开发场景。
免责声明:此文为转载,版权归原作者所有,本网对此信息的真实性不作保证,亦不作买卖依据。如有侵权,联系本网处理。